PFAlgoViz: A Debugging Visualiser for Pathfinding Search
PFAlgoViz is a visualising debugging tool for pathfinding search. It can be used to visualise progression of search and debug pathfinding algorithms. It can handle range of different types of algorithms(demos are provided below). This tool is highly customizable and provide flexibility to visualise any algorithm trace that you can augment using our docs.
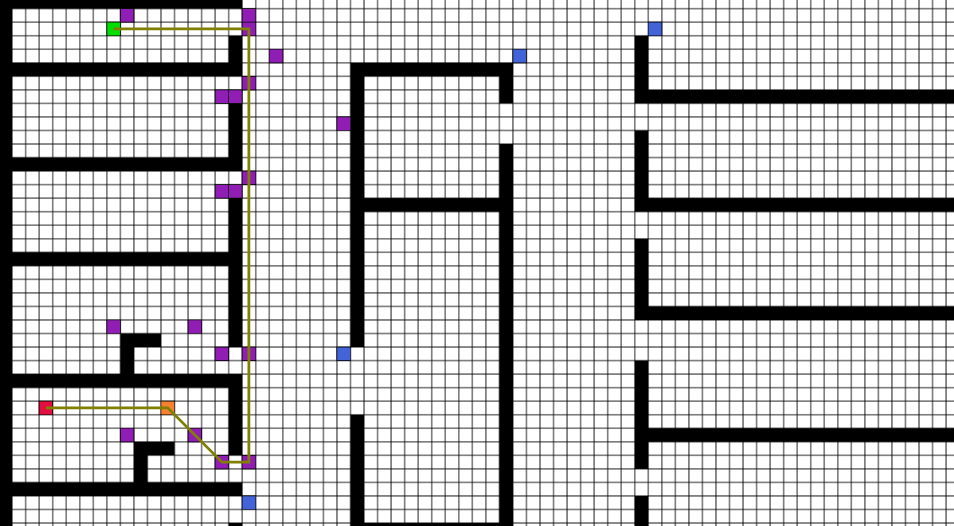
Grid-based pathfinding
This is one of the most popular domain in pathfinding, especially in game development. The search space is quantised into cells or tiles and the agent can move to adjacent tiles only(maximum 8 directions) avoiding the negative search spaces(or more commonly called, walls). The image shows visualisation of jump point search algorithm whose implementation can be found in WARTHOG pathfinding library which supports a variety of grid-based pathfinding techniques.
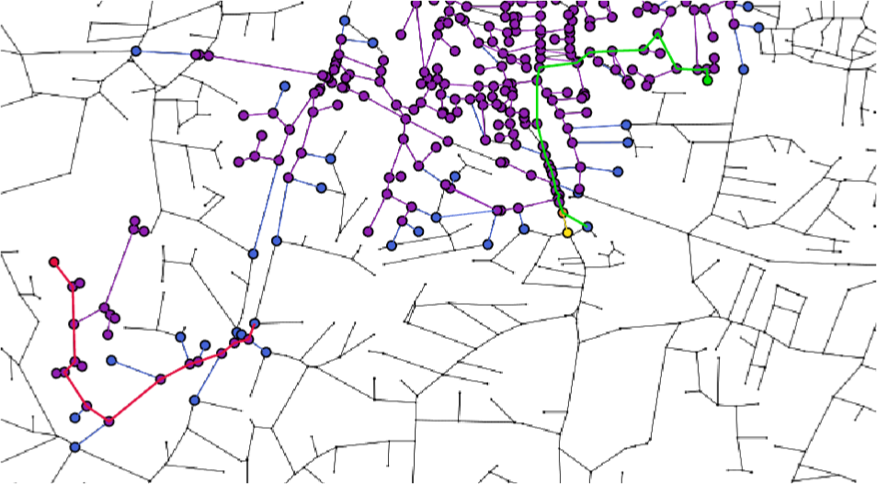
Bi-directional search
In some cases, instead of standard single source a single destination, we might have multiple source as well as multiple target nodes. Bi-directional search is one of such examples. In this search, the source expands towards target and target also simultaneously expands towards the source. The image shows visualisation of bi-directional A* implementation. This can also be found in WARTHOG pathfinding library. In this example, the road network routing problem is solved using bi-directional pathfinding algorithm.
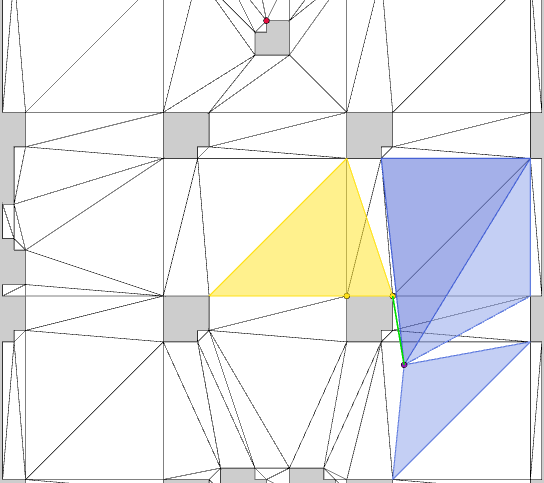
Path planning on a navigation mesh
In grid-based algorithm, the search space was divided into tiles or rectangles. In case of navigation mesh, we have convex polygons. The agent can enter or exit this polygon at any angle. This means that contrary to discrete search space in case grids or graphs, we have a continuous search space. The image shows visualisation of Polyanya whcih is state-of-the-art algorithm for path finding problems on a navigation mesh. The implementation can be again found in WARTHOG.
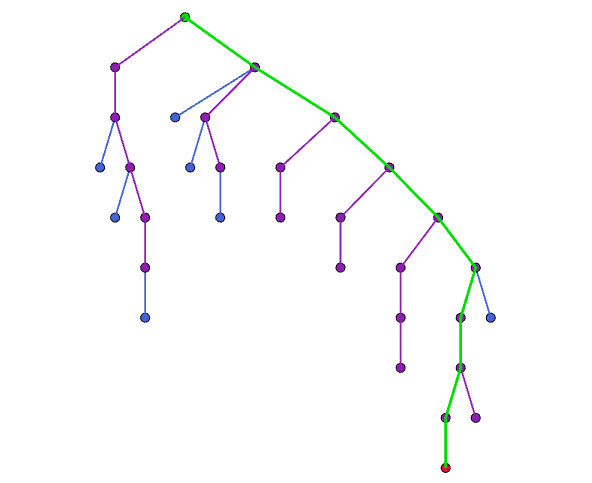
Graphs without embedding
Intuitively we imagine the search algorithm to operate on some environment which can be input map or graph. But there are some cases in which we don't have such embeddings. Examples can be social network graphs or combinatorial problems like 8 tile puzzle or MAPF. The app is capable of visualising these categories as well. The image shows example of visualisation of tree layout without any x-y embedding.
Demos
Developed at Monash University

Ideation & Management: Dr Daniel Harabor, Dr Michael Wybrow
Architecture & Development: Karan Batta - ![]()
![]()